Корейские ученые разработали роботизированную руку
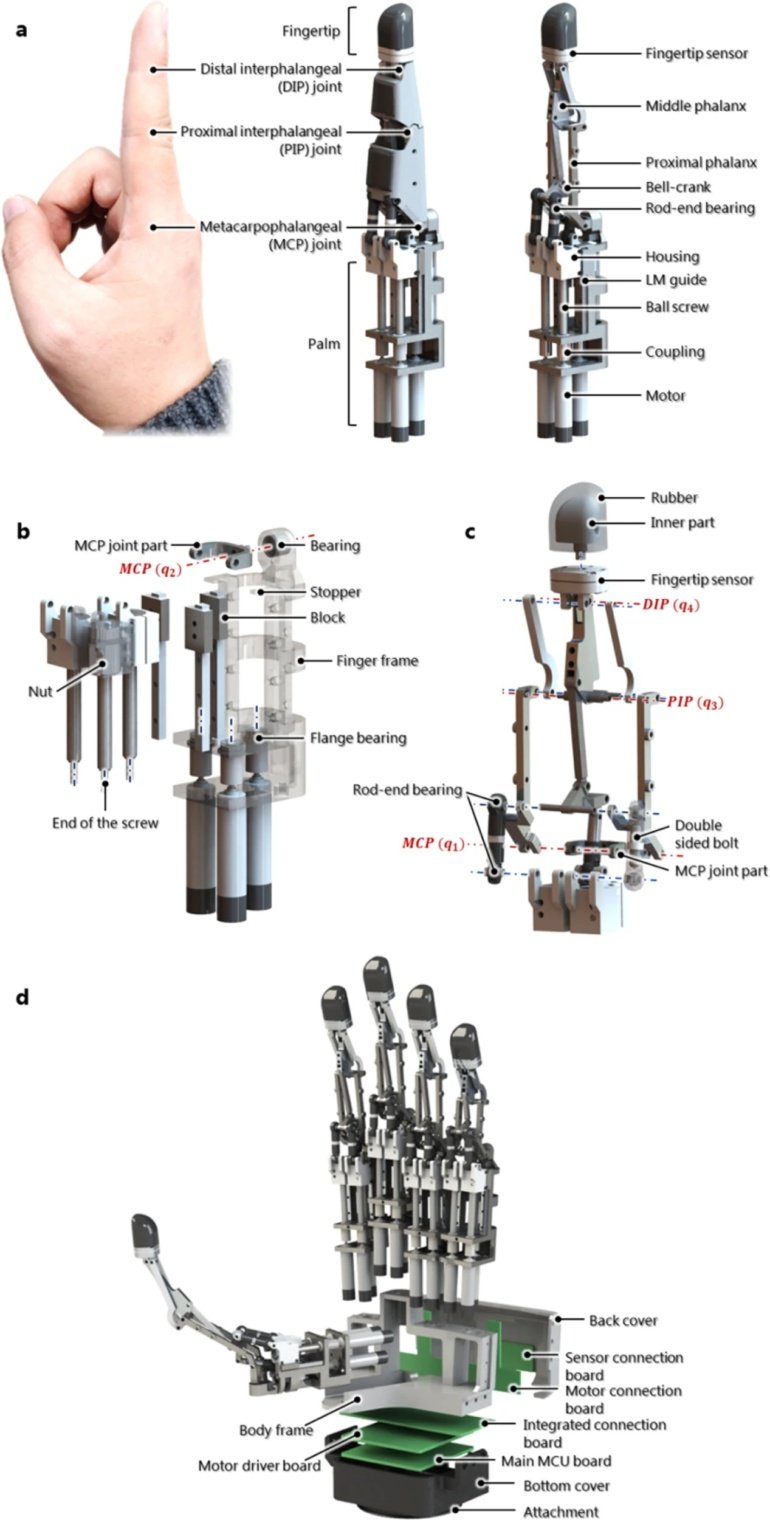
Исследователи Корейского института машин и материалов создали механизированную конечность, внешний вид и функционал которой схож с рукой человека. Роборука способная менять усилие сжатия и осуществлять множество действий, которые требуют точности и значительной подвижности. Разработка получила наименование ILDA.
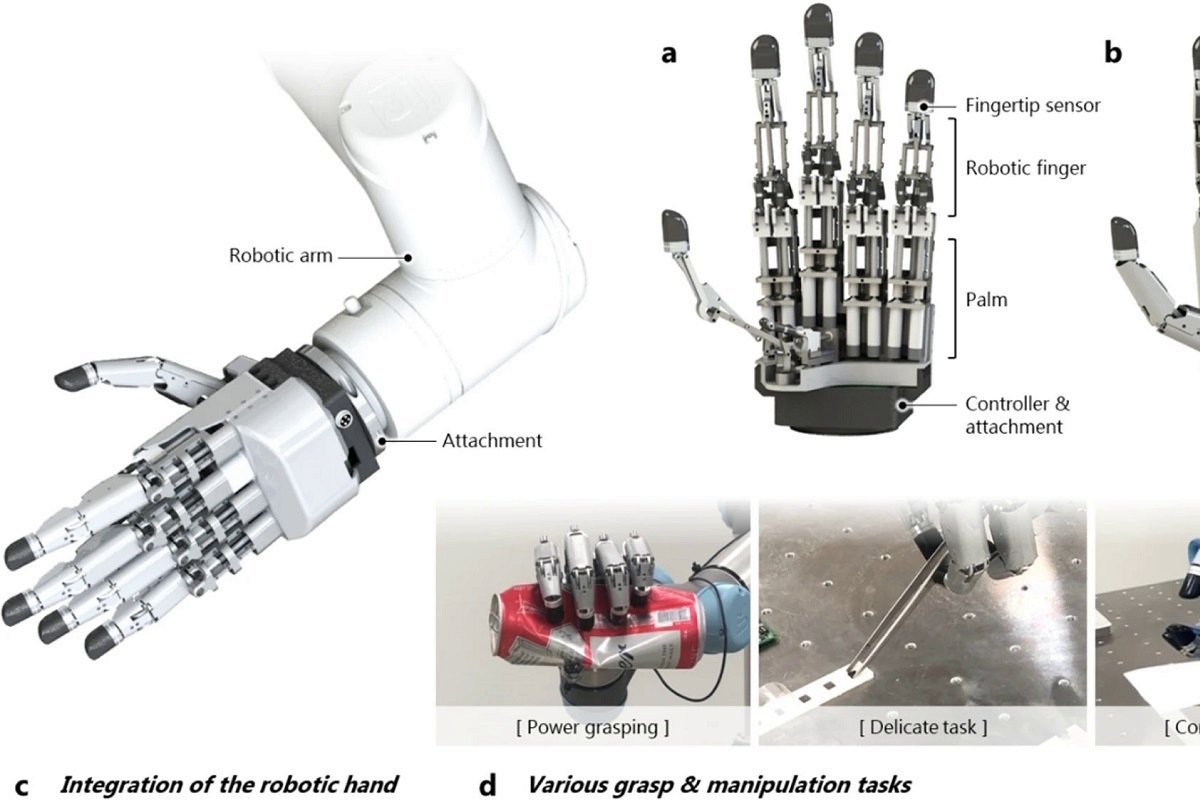
Конечность имеет два десятка суставов, обеспечивающих пятнадцать степеней свободы и нажатие пальцем с силой в 34 ньютона. Длина руки составляет 21,8 см, а вес – 1,1 кг. Проверка шла с помощью робота, к верхней конечности которого и прикрепили опытный образец.
Во время тестирования рука продемонстрировала достаточную силу для сдавливания жестяной банки и удержания гантели массой 18 килограммов. Помимо этого, конечность смогла разрезать бумажный лист ножницами, держать двумя пальцами яйцо, проводить точные манипуляции пинцетом.
Для создания роборуки корейцы использовали наработки от NASA, DLR и Shadow Robot, которые работали над подобными конечностями Robonaut, «Рука Давида» и Dextrous Hand соответственно.
Конечность имеет два десятка суставов, обеспечивающих пятнадцать степеней свободы и нажатие пальцем с силой в 34 ньютона. Длина руки составляет 21,8 см, а вес – 1,1 кг. Проверка шла с помощью робота, к верхней конечности которого и прикрепили опытный образец.
Во время тестирования рука продемонстрировала достаточную силу для сдавливания жестяной банки и удержания гантели массой 18 килограммов. Помимо этого, конечность смогла разрезать бумажный лист ножницами, держать двумя пальцами яйцо, проводить точные манипуляции пинцетом.
Для создания роборуки корейцы использовали наработки от NASA, DLR и Shadow Robot, которые работали над подобными конечностями Robonaut, «Рука Давида» и Dextrous Hand соответственно.





Комментариев пока нет :(